中空軸ステッピングモーターを正確に制御するにはどうすればよいですか?
2024年05月30日
中空軸ステッピングモーターを正確に制御するためには、以下の手順を実行する必要があります。
1. モーターの仕様を理解する: 中空軸ステッピングモーターのスペックシートやカタログを参照し、モーターの特性や制御要件を理解します。特に、ステップ角、最大トルク、電源電圧、電流制御方式などのパラメータに注目します。
2. 適切なドライバーを選択する: 中空軸ステッピングモーターを制御するためには、適切なドライバーが必要です。ドライバーはモーターに電力を供給し、ステップ信号を生成してモーターを制御します。モーターの電流容量や駆動方式に基づいて、適切なドライバーを選択します。

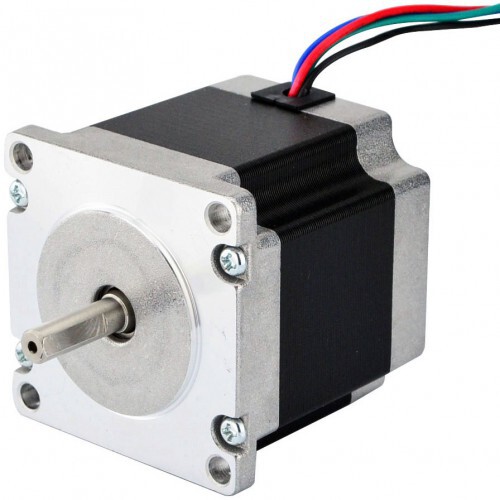
「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
3. ステップ信号を生成する: ステッピングモーターを制御するためには、ステップ信号を生成する制御回路が必要です。マイクロコントローラーや専用のステップジェネレーターを使用して、ステップ信号を生成します。ステップ角や回転方向などのパラメータを制御回路に適切に設定します。
4. 電流制御を最適化する: 中空軸ステッピングモーターは、適切な電流制御が重要です。ドライバーの電流設定やマイクロステップ設定などを調整し、モーターの最大トルクを引き出しながら、過熱や共振現象を回避するようにします。

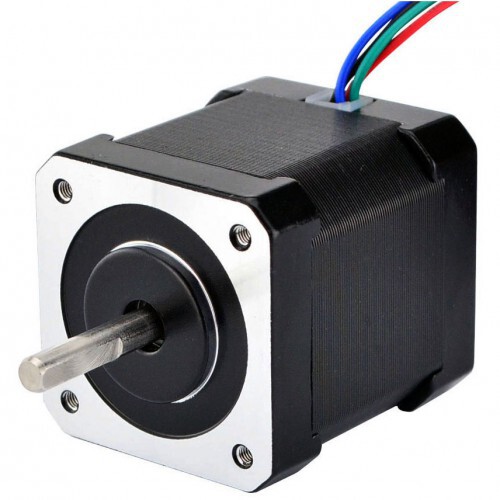
「写真の由来:Nema 17 中空シャフト ステッピングモーター バイポーラ 0.36 Nm(42.49oz.in) 1.5A 42x42x47.75mm」
5. ポジション制御を実装する: 中空軸ステッピングモーターは、ポジション制御に使用されることが多いです。位置センサー(例: エンコーダー)を使用して、モーターの現在位置をフィードバックし、目標位置に正確に制御します。適切な制御アルゴリズム(例: PID制御)を実装し、目標位置への収束性と正確性を向上させます。
6. 環境影響を考慮する: 中空軸ステッピングモーターは、環境の影響を受けやすい場合があります。温度変化や振動などの要素を考慮し、モーターの正確な制御に影響を与えないような対策を講じます。例えば、適切な冷却や振動吸収材の使用などが考慮されます。
これらの手順を実行することで、中空軸ステッピングモーターを正確に制御することができます。また、実際のアプリケーションに応じて、上記の手順をカスタマイズすることが重要です。必要に応じて、専門家やメーカーのサポートを利用することもおすすめします。
1. モーターの仕様を理解する: 中空軸ステッピングモーターのスペックシートやカタログを参照し、モーターの特性や制御要件を理解します。特に、ステップ角、最大トルク、電源電圧、電流制御方式などのパラメータに注目します。
2. 適切なドライバーを選択する: 中空軸ステッピングモーターを制御するためには、適切なドライバーが必要です。ドライバーはモーターに電力を供給し、ステップ信号を生成してモーターを制御します。モーターの電流容量や駆動方式に基づいて、適切なドライバーを選択します。

「写真の由来:Nema 23 中空シャフト ステッピングモーター バイポーラ 双轴 1.45 Nm(205.38oz.in) 2.0A 57x57x65mm」
3. ステップ信号を生成する: ステッピングモーターを制御するためには、ステップ信号を生成する制御回路が必要です。マイクロコントローラーや専用のステップジェネレーターを使用して、ステップ信号を生成します。ステップ角や回転方向などのパラメータを制御回路に適切に設定します。
4. 電流制御を最適化する: 中空軸ステッピングモーターは、適切な電流制御が重要です。ドライバーの電流設定やマイクロステップ設定などを調整し、モーターの最大トルクを引き出しながら、過熱や共振現象を回避するようにします。

「写真の由来:Nema 17 中空シャフト ステッピングモーター バイポーラ 0.36 Nm(42.49oz.in) 1.5A 42x42x47.75mm」
5. ポジション制御を実装する: 中空軸ステッピングモーターは、ポジション制御に使用されることが多いです。位置センサー(例: エンコーダー)を使用して、モーターの現在位置をフィードバックし、目標位置に正確に制御します。適切な制御アルゴリズム(例: PID制御)を実装し、目標位置への収束性と正確性を向上させます。
6. 環境影響を考慮する: 中空軸ステッピングモーターは、環境の影響を受けやすい場合があります。温度変化や振動などの要素を考慮し、モーターの正確な制御に影響を与えないような対策を講じます。例えば、適切な冷却や振動吸収材の使用などが考慮されます。
これらの手順を実行することで、中空軸ステッピングモーターを正確に制御することができます。また、実際のアプリケーションに応じて、上記の手順をカスタマイズすることが重要です。必要に応じて、専門家やメーカーのサポートを利用することもおすすめします。
Posted by patricia at
15:37
│Comments(0)
小型DCモーターの消費電力を回路設計で削減する方法
2024年05月23日
小型DCモーターの消費電力を回路設計で削減するためには、以下の方法を検討することが重要です:
1. 適切な電源電圧の選択: DCモーターの仕様に基づいて、最適な電源電圧を選択します。高すぎる電源電圧は、モーターに過剰な電力を供給し、消費電力が増加します。仕様書やメーカーから提供されるガイドラインに従って、適切な電源電圧を設定します。

「写真の由来:24V 小型ブラシ付きDCギアモーター PA28-28245800-G515 16Kg.cm/8.9RPM 515:1 遊星ギアボックス付き」
2. ロードの最適化: DCモーターの負荷を最適化することで、消費電力を削減できます。例えば、モーターが無駄な負荷に抵抗することなく、スムーズに回転するように設計します。また、歯車やプーリーの摩擦を減らすなどの方法も検討します。
3. モータードライバの選択: 効率の高いモータードライバを選択することも重要です。モータードライバは、モーターの駆動制御を行いますが、一部のドライバは効率が低く、不必要に電力を消費します。効率の高いモータードライバを選ぶことで、消費電力を削減できます。

「写真の由来:24V ブラシ付きDCギヤードモーター PA28-28245800-G369 11.5Kg.cm/12RPM、369:1 遊星ギアボックス付き」
4. PWM制御の使用: パルス幅変調(PWM)制御を使用して、モーターの速度を制御します。PWM制御は、モーターに一定の電力を供給する代わりに、パルスの幅を変えることで平均電力を調整します。これにより、モーターの効率が向上し、消費電力が削減されます。
5. バックEMFの回収: モーターが回転する際に発生するバックEMF(逆起電力)を回収する方法を検討します。バックEMFを回収することで、モーターがより効率的に動作し、消費電力を削減できます。バックEMF回収回路や回生ブレーキ回路などの技術を使用することがあります。
これらの方法は、小型DCモーターの消費電力を削減するための一般的なアプローチです。ただし、具体的なアプリケーションとモーターの仕様に基づいて、最適な回路設計を行うことが重要です。また、電力効率の改善には、モーター自体の効率や負荷条件にも注意を払う必要があります。
1. 適切な電源電圧の選択: DCモーターの仕様に基づいて、最適な電源電圧を選択します。高すぎる電源電圧は、モーターに過剰な電力を供給し、消費電力が増加します。仕様書やメーカーから提供されるガイドラインに従って、適切な電源電圧を設定します。

「写真の由来:24V 小型ブラシ付きDCギアモーター PA28-28245800-G515 16Kg.cm/8.9RPM 515:1 遊星ギアボックス付き」
2. ロードの最適化: DCモーターの負荷を最適化することで、消費電力を削減できます。例えば、モーターが無駄な負荷に抵抗することなく、スムーズに回転するように設計します。また、歯車やプーリーの摩擦を減らすなどの方法も検討します。
3. モータードライバの選択: 効率の高いモータードライバを選択することも重要です。モータードライバは、モーターの駆動制御を行いますが、一部のドライバは効率が低く、不必要に電力を消費します。効率の高いモータードライバを選ぶことで、消費電力を削減できます。

「写真の由来:24V ブラシ付きDCギヤードモーター PA28-28245800-G369 11.5Kg.cm/12RPM、369:1 遊星ギアボックス付き」
4. PWM制御の使用: パルス幅変調(PWM)制御を使用して、モーターの速度を制御します。PWM制御は、モーターに一定の電力を供給する代わりに、パルスの幅を変えることで平均電力を調整します。これにより、モーターの効率が向上し、消費電力が削減されます。
5. バックEMFの回収: モーターが回転する際に発生するバックEMF(逆起電力)を回収する方法を検討します。バックEMFを回収することで、モーターがより効率的に動作し、消費電力を削減できます。バックEMF回収回路や回生ブレーキ回路などの技術を使用することがあります。
これらの方法は、小型DCモーターの消費電力を削減するための一般的なアプローチです。ただし、具体的なアプリケーションとモーターの仕様に基づいて、最適な回路設計を行うことが重要です。また、電力効率の改善には、モーター自体の効率や負荷条件にも注意を払う必要があります。
Posted by patricia at
15:39
│Comments(0)
スイッチング電源の分類と応用
2024年05月15日
スイッチング電源は、エネルギー変換装置として広く使用されており、様々な分類と応用があります。以下に一般的なスイッチング電源の分類と主な応用をいくつか説明します。
1. フライバック型スイッチング電源:
フライバック型スイッチング電源は、変圧器を使用して入力電圧を変換する方式です。主に低出力のアプリケーションに適しており、ACアダプタや小型電子機器などで広く使用されています。

「写真の由来:SE-450-24 MEAN WELL 451.2W 18.8A 24V スイッチング電源/ CNC 電源」
2. ブースト型スイッチング電源:
ブースト型スイッチング電源は、入力電圧を昇圧するために使用されます。バッテリ駆動の機器やLEDドライバなど、電源電圧が必要なアプリケーションに適しています。
3. バックブースト型スイッチング電源:
バックブースト型スイッチング電源は、入力電圧を昇圧または降圧するために使用されます。電源電圧が可変である必要があるアプリケーションに適しており、ソーラー充電器やモバイルデバイスの充電回路などで使用されます。
4. フライホイール型スイッチング電源:
フライホイール型スイッチング電源は、高出力アプリケーションや電力変換効率が重要な場合に使用されます。電力インバータや太陽光発電システムなどの応用があります。

「写真の由来:SE-600-48 MEAN WELL 600W 12.5A 48V スイッチング電源/ CNC 電源」
5. プッシュプル型スイッチング電源:
プッシュプル型スイッチング電源は、変圧器を使用して入力電圧を変換する方式です。高出力アプリケーションで使用され、高効率と高い電圧変換比を実現します。
これらは一部のスイッチング電源の分類と応用の例です。スイッチング電源は、省エネルギーや高効率な電力変換を実現するため、さまざまな産業や電子機器の分野で広く利用されています。特定のアプリケーションに最適なスイッチング電源の選択には、電力要件、入力電圧範囲、出力電圧範囲、効率、信頼性などの要素を考慮する必要があります。
1. フライバック型スイッチング電源:
フライバック型スイッチング電源は、変圧器を使用して入力電圧を変換する方式です。主に低出力のアプリケーションに適しており、ACアダプタや小型電子機器などで広く使用されています。

「写真の由来:SE-450-24 MEAN WELL 451.2W 18.8A 24V スイッチング電源/ CNC 電源」
2. ブースト型スイッチング電源:
ブースト型スイッチング電源は、入力電圧を昇圧するために使用されます。バッテリ駆動の機器やLEDドライバなど、電源電圧が必要なアプリケーションに適しています。
3. バックブースト型スイッチング電源:
バックブースト型スイッチング電源は、入力電圧を昇圧または降圧するために使用されます。電源電圧が可変である必要があるアプリケーションに適しており、ソーラー充電器やモバイルデバイスの充電回路などで使用されます。
4. フライホイール型スイッチング電源:
フライホイール型スイッチング電源は、高出力アプリケーションや電力変換効率が重要な場合に使用されます。電力インバータや太陽光発電システムなどの応用があります。

「写真の由来:SE-600-48 MEAN WELL 600W 12.5A 48V スイッチング電源/ CNC 電源」
5. プッシュプル型スイッチング電源:
プッシュプル型スイッチング電源は、変圧器を使用して入力電圧を変換する方式です。高出力アプリケーションで使用され、高効率と高い電圧変換比を実現します。
これらは一部のスイッチング電源の分類と応用の例です。スイッチング電源は、省エネルギーや高効率な電力変換を実現するため、さまざまな産業や電子機器の分野で広く利用されています。特定のアプリケーションに最適なスイッチング電源の選択には、電力要件、入力電圧範囲、出力電圧範囲、効率、信頼性などの要素を考慮する必要があります。
Posted by patricia at
15:44
│Comments(0)
バイポーラステッピングモータの作用
2024年05月09日
バイポーラステッピングモータは、二相または四相の巻線を持つモータであり、特定のパルス信号を与えることで正確なステップ運動を実現します。以下にバイポーラステッピングモータの作用を説明します。
1. モータの構成: バイポーラステッピングモータは、固定子(ステータ)と回転子(ロータ)から構成されます。ステータには二相または四相の巻線があり、それぞれが異なる極性を持っています。回転子には永久磁石が取り付けられており、ステータの磁場と相互作用します。

「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
2. ステップ運動: バイポーラステッピングモータは、ステップモードで動作します。ステップとは、モータが1回転するために必要な最小単位であり、一般的には1.8度(2相)または0.9度(4相)です。
3. パルス信号の制御: バイポーラステッピングモータは、パルス信号を制御することでステップ運動を実現します。パルス信号は、モータドライバから供給され、ステータの巻線に対して正確なタイミングと極性で電流を流します。

「写真の由来:Nema 17 バイポーラステッピングモータ 59Ncm (84oz.in) 2A 42x48mm 4 ワイヤー w/ 1m Cable & Connector」
4. コイルの励磁パターン: バイポーラステッピングモータでは、ステップ運動を制御するためにコイルの励磁パターンが使用されます。二相モータでは、1相と2相のコイルに順番に電流を流すことでステップ運動を実現します。四相モータでは、1相から4相までのコイルに対して電流を流すことでステップ運動を実現します。
5. ステップシーケンス: バイポーラステッピングモータでは、特定のステップシーケンスを使用して正確なステップ運動を実現します。一般的なステップシーケンスには、フルステップ、ハーフステップ、マイクロステップなどがあります。それぞれのステップシーケンスは、電流の流れるコイルの組み合わせによって異なります。
6. 位置制御とトルク特性: バイポーラステッピングモータは、正確な位置制御が可能であり、ステップ単位での移動や位置決めができます。また、ステッピングモータは低速域でも高いトルクを発生する特性があります。
バイポーラステッピングモータは、位置決めや精密なモーション制御が必要なアプリケーションに広く使用されています。3Dプリンタ、ロボットアーム、医療機器など、さまざまな分野で利用されています。
1. モータの構成: バイポーラステッピングモータは、固定子(ステータ)と回転子(ロータ)から構成されます。ステータには二相または四相の巻線があり、それぞれが異なる極性を持っています。回転子には永久磁石が取り付けられており、ステータの磁場と相互作用します。
「写真の由来:Nema 23 バイポーラステッピングモータ 1.8°1.26Nm (178.4oz.in) 2.8A 2.5V 57x57x56mm 4 ワイヤー」
2. ステップ運動: バイポーラステッピングモータは、ステップモードで動作します。ステップとは、モータが1回転するために必要な最小単位であり、一般的には1.8度(2相)または0.9度(4相)です。
3. パルス信号の制御: バイポーラステッピングモータは、パルス信号を制御することでステップ運動を実現します。パルス信号は、モータドライバから供給され、ステータの巻線に対して正確なタイミングと極性で電流を流します。
「写真の由来:Nema 17 バイポーラステッピングモータ 59Ncm (84oz.in) 2A 42x48mm 4 ワイヤー w/ 1m Cable & Connector」
4. コイルの励磁パターン: バイポーラステッピングモータでは、ステップ運動を制御するためにコイルの励磁パターンが使用されます。二相モータでは、1相と2相のコイルに順番に電流を流すことでステップ運動を実現します。四相モータでは、1相から4相までのコイルに対して電流を流すことでステップ運動を実現します。
5. ステップシーケンス: バイポーラステッピングモータでは、特定のステップシーケンスを使用して正確なステップ運動を実現します。一般的なステップシーケンスには、フルステップ、ハーフステップ、マイクロステップなどがあります。それぞれのステップシーケンスは、電流の流れるコイルの組み合わせによって異なります。
6. 位置制御とトルク特性: バイポーラステッピングモータは、正確な位置制御が可能であり、ステップ単位での移動や位置決めができます。また、ステッピングモータは低速域でも高いトルクを発生する特性があります。
バイポーラステッピングモータは、位置決めや精密なモーション制御が必要なアプリケーションに広く使用されています。3Dプリンタ、ロボットアーム、医療機器など、さまざまな分野で利用されています。
Posted by patricia at
15:09
│Comments(0)












