中空ステッピングモータの主な機能は何ですか?
2024年09月24日
中空ステッピングモータは、一般的なステッピングモータとは異なり、中空部分がある特殊な構造を持つモーターです。主な機能や特徴は以下の通りです:
1. 中空構造:
- 中空ステッピングモータは、モーターの中心に空洞(中空部分)を有する特殊な構造を持ちます。この中空部分は、ケーブル、レーザービーム、空気や液体の通過などの用途に活用されます。

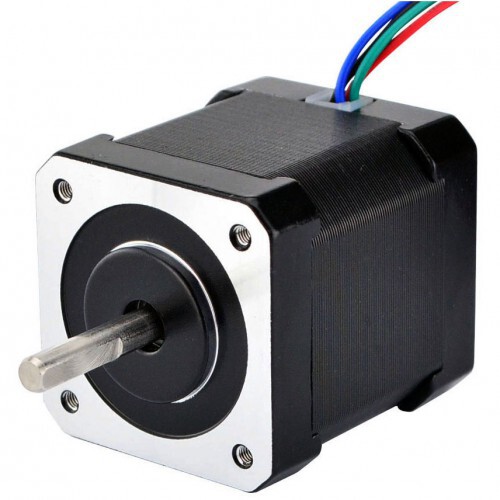
「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 33Ncm (46.74oz.in) 2.0A 35x35x48mm」
2. 高トルク密度:
- 中空ステッピングモータは、コンパクトなサイズに対して高いトルク密度を持ちます。これにより、限られたスペース内で効率的に高い出力を実現できます。
3. 位置制御:
- ステッピングモータの一種であるため、一定のステップ角で回転し、正確な位置制御を可能にします。この特性は、精密な位置決めや移動が必要なアプリケーションに適しています。
4. 高い精度:
- 中空ステッピングモータは、ステップモーターの特性を持つため、高い精度で動作します。この精度は、医療機器、ロボットアーム、航空宇宙産業などの分野で重要です。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 16Ncm (22.66oz.in) 1.25A 35x35x35mm」
5. 静止トルク:
- 中空ステッピングモータは、停止時にも保持トルクを維持できるため、位置保持や負荷抑制に有用です。
6. 高い効率:
- ステッピングモーターは、パルスによって正確に制御されるため、必要な時にのみ電力を消費する効率的な動作が可能です。
中空ステッピングモータは、特殊な空間要件や高いトルク密度が必要なアプリケーションに適しています。その機能と特性により、さまざまな産業分野で幅広い用途に活用されています。
1. 中空構造:
- 中空ステッピングモータは、モーターの中心に空洞(中空部分)を有する特殊な構造を持ちます。この中空部分は、ケーブル、レーザービーム、空気や液体の通過などの用途に活用されます。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 33Ncm (46.74oz.in) 2.0A 35x35x48mm」
2. 高トルク密度:
- 中空ステッピングモータは、コンパクトなサイズに対して高いトルク密度を持ちます。これにより、限られたスペース内で効率的に高い出力を実現できます。
3. 位置制御:
- ステッピングモータの一種であるため、一定のステップ角で回転し、正確な位置制御を可能にします。この特性は、精密な位置決めや移動が必要なアプリケーションに適しています。
4. 高い精度:
- 中空ステッピングモータは、ステップモーターの特性を持つため、高い精度で動作します。この精度は、医療機器、ロボットアーム、航空宇宙産業などの分野で重要です。

「写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 16Ncm (22.66oz.in) 1.25A 35x35x35mm」
5. 静止トルク:
- 中空ステッピングモータは、停止時にも保持トルクを維持できるため、位置保持や負荷抑制に有用です。
6. 高い効率:
- ステッピングモーターは、パルスによって正確に制御されるため、必要な時にのみ電力を消費する効率的な動作が可能です。
中空ステッピングモータは、特殊な空間要件や高いトルク密度が必要なアプリケーションに適しています。その機能と特性により、さまざまな産業分野で幅広い用途に活用されています。
Posted by patricia at
12:04
│Comments(0)
PM型ステッピングモータにおける永久磁石材料の応用
2024年09月14日
PM型ステッピングモーターでは、永久磁石材料が重要な役割を果たしています。以下に永久磁石材料がPM型ステッピングモーターにおいてどのように応用されるかについて説明します:
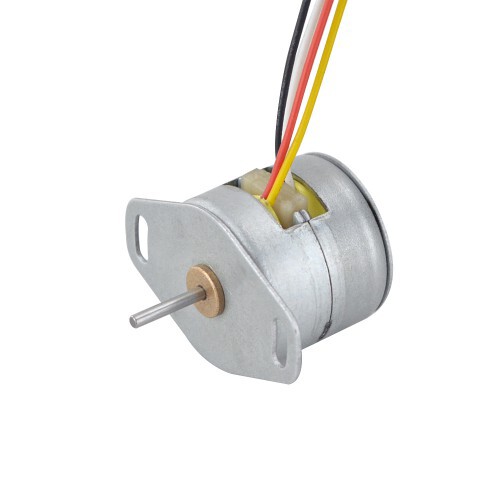
1. 磁場の発生:
- PM型ステッピングモーターでは、永久磁石がローターに取り付けられており、これにより固定された磁場が発生します。この磁場は、ステーター内のコイルに流れる電流によって制御され、モーターの回転を駆動します。

「写真の由来:Φ20x18.2mm PM型ステッピングモーター 18度 5.88mN.m (0.833oz.in) 0.5A 4ワイヤー」
2. 高い出力密度:
- 永久磁石は高い磁力を持つため、小型のステッピングモーターでも十分な出力を発生することができます。これにより、モーターの出力密度を向上させることができます。
3. 高い効率:
- PM型ステッピングモーターは永久磁石を使用するため、磁気エネルギーの損失が少なく、効率が高い特性を持ちます。これにより、モーターの動作が効率的であり、省エネルギー性が向上します。

「写真の由来:Φ42x23.5mm PM型ステッピングモーター 7.5度 68.6mN.m (9.717oz.in) 0.6A 4ワイヤー」
4. 精密な位置制御:
- 永久磁石の磁場は安定しており、ステッピングモーターの位置制御において高い精度を提供します。このため、PM型ステッピングモーターは精密な位置決めが必要なアプリケーションに適しています。
5. 信頼性の向上:
- 永久磁石は磁力が安定しており、寿命が長い特性を持っています。そのため、PM型ステッピングモーターは信頼性が高く、メンテナンスが比較的少なくて済むという利点があります。
永久磁石材料はPM型ステッピングモーターにおいて重要な要素であり、モーターの性能や特性を向上させる役割を果たしています。そのため、適切な永久磁石材料の選択がモーターの設計や性能に大きな影響を与えることになります。
1. 磁場の発生:
- PM型ステッピングモーターでは、永久磁石がローターに取り付けられており、これにより固定された磁場が発生します。この磁場は、ステーター内のコイルに流れる電流によって制御され、モーターの回転を駆動します。
「写真の由来:Φ20x18.2mm PM型ステッピングモーター 18度 5.88mN.m (0.833oz.in) 0.5A 4ワイヤー」
2. 高い出力密度:
- 永久磁石は高い磁力を持つため、小型のステッピングモーターでも十分な出力を発生することができます。これにより、モーターの出力密度を向上させることができます。
3. 高い効率:
- PM型ステッピングモーターは永久磁石を使用するため、磁気エネルギーの損失が少なく、効率が高い特性を持ちます。これにより、モーターの動作が効率的であり、省エネルギー性が向上します。

「写真の由来:Φ42x23.5mm PM型ステッピングモーター 7.5度 68.6mN.m (9.717oz.in) 0.6A 4ワイヤー」
4. 精密な位置制御:
- 永久磁石の磁場は安定しており、ステッピングモーターの位置制御において高い精度を提供します。このため、PM型ステッピングモーターは精密な位置決めが必要なアプリケーションに適しています。
5. 信頼性の向上:
- 永久磁石は磁力が安定しており、寿命が長い特性を持っています。そのため、PM型ステッピングモーターは信頼性が高く、メンテナンスが比較的少なくて済むという利点があります。
永久磁石材料はPM型ステッピングモーターにおいて重要な要素であり、モーターの性能や特性を向上させる役割を果たしています。そのため、適切な永久磁石材料の選択がモーターの設計や性能に大きな影響を与えることになります。
Posted by patricia at
16:00
│Comments(0)
ドライバーの電流制限と減衰モードを調整して、バイポーラステッピングモータの動的性能と効率を最適化する方法
2024年09月09日
バイポーラステッピングモータの動的性能と効率を最適化するために、ドライバーの電流制限と減衰モードを調整する方法を以下に示します:
1. 電流制限の調整:
- ステップごとの電流制限: ステッピングモータの各ステップで流れる電流を制限することにより、モーターの発熱を最小限に抑えつつ、適切なトルクを維持します。適切な電流制限を設定することで、モーターの効率を向上させることができます。
- 加速および減速時の電流制限: モーターの加速および減速時には、電流を増減させることでスムーズな動作を実現します。適切な電流制限を設定することで、振動や共振を抑え、効率的な動作を実現します。

「写真の由来:Nema 17 バイポーラステッピングモータ 59Ncm (84oz.in) 2A 42x48mm 4 ワイヤー w/ 1m Cable & Connector」
2. 減衰モードの調整:
- Fast Decay(高速減衰): モーターを速く停止させるために使用され、高速減衰は短時間でモーターをブレーキする効果があります。高速減衰モードを選択することで、動的性能を向上させることができます。
- Slow Decay(低速減衰): モーターを滑らかに停止させるために使用され、低速減衰はブレーキングエネルギーを回収することができる場合があります。低速減衰モードを選択することで、効率を向上させることができます。
3. 振動および共振の抑制:
- 適切な電流制限と減衰モードの設定により、モーターの振動や共振を抑制し、精密な動作を実現します。振動や共振が発生すると、効率が低下し、モーターの寿命が短くなる可能性があります。

「写真の由来:デュアルシャフト Nema 23 バイポーラ 1.8°2.5Nm (354oz.in) 3A 57x57x114mm 8 ワイヤー」
4. ドライバーの設定の最適化:
- モーターの仕様に合わせてドライバーの設定を最適化し、最適な動的性能と効率を実現します。ドライバーのマニュアルを参照し、適切な設定値を選択します。
これらの方法を使用して、バイポーラステッピングモータの動的性能と効率を最適化することができます。適切な設定により、モーターの正確な位置制御や動作の滑らかさを向上させることができます。
1. 電流制限の調整:
- ステップごとの電流制限: ステッピングモータの各ステップで流れる電流を制限することにより、モーターの発熱を最小限に抑えつつ、適切なトルクを維持します。適切な電流制限を設定することで、モーターの効率を向上させることができます。
- 加速および減速時の電流制限: モーターの加速および減速時には、電流を増減させることでスムーズな動作を実現します。適切な電流制限を設定することで、振動や共振を抑え、効率的な動作を実現します。
「写真の由来:Nema 17 バイポーラステッピングモータ 59Ncm (84oz.in) 2A 42x48mm 4 ワイヤー w/ 1m Cable & Connector」
2. 減衰モードの調整:
- Fast Decay(高速減衰): モーターを速く停止させるために使用され、高速減衰は短時間でモーターをブレーキする効果があります。高速減衰モードを選択することで、動的性能を向上させることができます。
- Slow Decay(低速減衰): モーターを滑らかに停止させるために使用され、低速減衰はブレーキングエネルギーを回収することができる場合があります。低速減衰モードを選択することで、効率を向上させることができます。
3. 振動および共振の抑制:
- 適切な電流制限と減衰モードの設定により、モーターの振動や共振を抑制し、精密な動作を実現します。振動や共振が発生すると、効率が低下し、モーターの寿命が短くなる可能性があります。

「写真の由来:デュアルシャフト Nema 23 バイポーラ 1.8°2.5Nm (354oz.in) 3A 57x57x114mm 8 ワイヤー」
4. ドライバーの設定の最適化:
- モーターの仕様に合わせてドライバーの設定を最適化し、最適な動的性能と効率を実現します。ドライバーのマニュアルを参照し、適切な設定値を選択します。
これらの方法を使用して、バイポーラステッピングモータの動的性能と効率を最適化することができます。適切な設定により、モーターの正確な位置制御や動作の滑らかさを向上させることができます。
Posted by patricia at
15:19
│Comments(0)
ACサーボモーターの選定のポイント
2024年09月02日
ACサーボモーターを選定する際に考慮すべき主なポイントを以下に示します:
1. トルク要件:
- アプリケーションで必要なトルクと速度要件を明確に把握し、それに適したACサーボモーターを選定します。トルク要件は、負荷の種類、重量、慣性、および動作条件などによって異なります。
2. 精度と解像度:
- サーボモーターの精度や解像度がアプリケーションに適しているかどうかを確認します。高い解像度や位置決め精度が必要な場合は、それに対応したモーターを選択する必要があります。
3. 応答速度:
- アプリケーションの要求に応じた応答速度が必要です。高速な動作や急速な加速・減速が必要な場合は、それに対応した高応答性のACサーボモーターを選定します。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
4. 制御方式:
- サーボモーターの制御方式(位置制御、速度制御、トルク制御)がアプリケーションに適しているかを確認します。適切な制御方式を選択することで、システムのパフォーマンスを最適化することができます。
5. 環境条件:
- 使用環境に適した耐久性や耐環境性を持つACサーボモーターを選定します。温度、湿度、振動などの環境条件に耐えられるモーターを選択することが重要です。

「写真の由来:T6シリーズ 750W デジタル AC サーボモーター & ドライバー キット 2.39Nm (ブレーキ 、17 ビット エンコーダー付き )」
6. 通信プロトコル:
- システムとの通信や統合に使用する通信プロトコルが重要です。適切な通信プロトコルをサポートするACサーボモーターを選択し、シームレスな統合を実現します。
7. メンテナンス性:
- メンテナンス性や修理の容易さも考慮に入れるべきポイントです。故障時の修理や交換が容易であるかどうかを確認し、適切なサポートが得られるかも重要です。
これらのポイントを考慮して、特定のアプリケーションやシステムに最適なACサーボモーターを選定することが重要です。
1. トルク要件:
- アプリケーションで必要なトルクと速度要件を明確に把握し、それに適したACサーボモーターを選定します。トルク要件は、負荷の種類、重量、慣性、および動作条件などによって異なります。
2. 精度と解像度:
- サーボモーターの精度や解像度がアプリケーションに適しているかどうかを確認します。高い解像度や位置決め精度が必要な場合は、それに対応したモーターを選択する必要があります。
3. 応答速度:
- アプリケーションの要求に応じた応答速度が必要です。高速な動作や急速な加速・減速が必要な場合は、それに対応した高応答性のACサーボモーターを選定します。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
4. 制御方式:
- サーボモーターの制御方式(位置制御、速度制御、トルク制御)がアプリケーションに適しているかを確認します。適切な制御方式を選択することで、システムのパフォーマンスを最適化することができます。
5. 環境条件:
- 使用環境に適した耐久性や耐環境性を持つACサーボモーターを選定します。温度、湿度、振動などの環境条件に耐えられるモーターを選択することが重要です。

「写真の由来:T6シリーズ 750W デジタル AC サーボモーター & ドライバー キット 2.39Nm (ブレーキ 、17 ビット エンコーダー付き )」
6. 通信プロトコル:
- システムとの通信や統合に使用する通信プロトコルが重要です。適切な通信プロトコルをサポートするACサーボモーターを選択し、シームレスな統合を実現します。
7. メンテナンス性:
- メンテナンス性や修理の容易さも考慮に入れるべきポイントです。故障時の修理や交換が容易であるかどうかを確認し、適切なサポートが得られるかも重要です。
これらのポイントを考慮して、特定のアプリケーションやシステムに最適なACサーボモーターを選定することが重要です。
Posted by patricia at
16:11
│Comments(0)












